Non-stationary Time Series¶
In real-world applications, time series data usually exhibits Trend, Seasonality, or Cyclicality, making it inherently non-stationary. To analyze such data, we must transform it into a stationary series using mathematical operators.
1. Mathematical Operators¶
Two primary operators are used to manipulate and stabilize time series data:
- Backshift Operator (\(B\)): Shifts the observation back by \(d\) time units.
$\(B^dY_{t} = Y_{t-d}\)$ - Differencing Operator (\(\nabla\)): A technique popularized by Box & Jenkins to remove non-stationary components.
- First Difference: \(\nabla Y_{t} = Y_{t} - Y_{t-1} = (1-B)Y_{t}\)
- Second Difference: \(\nabla^2 Y_{t} = \nabla(\nabla Y_{t}) = Y_{t} - 2Y_{t-1} + Y_{t-2}\)
- Lag \(d\) Difference: \(\nabla_{d}Y_{t} = Y_{t} - Y_{t-d}\) (Used primarily for removing seasonality).
2. Eliminating Trends through Differencing¶
Example 1: Linear Trend¶
Consider a model with a linear trend: \(Y_{t} = bt + S_{t}\). It is non-stationary because the mean is time-dependent. Applying a first difference:
$\(\nabla Y_{t} = bt + S_{t} - (b(t-1) + S_{t-1}) = S_{t} + b - S_{t-1}\)$
The result is now stationary as the time-dependent term \(t\) is eliminated.
Example 2: Quadratic Trend¶
For a stronger trend like \(Y_{t} = bt^{2} + S_{t}\), a single differencing is insufficient. We apply the second difference operator:
$\(W_{t} = \nabla^{2}Y_{t} = Y_{t} - 2Y_{t-1} + Y_{t-2}\)$
This eventually simplifies to:
$\(W_{t} = 2b + S_{t} - 2S_{t-1} + S_{t-2}\)$
The quadratic growth is neutralized, resulting in a stationary process.
3. Random Walk as a Non-Stationary Process¶
The Random Walk model is \(Y_{t} = Y_{t-1} + e_{t}\). If viewed as an \(AR(1)\) process:
$\(Y_{t} = c + \phi_{1} Y_{t-1} + e_{t}\)$
Here, \(c=0\) and \(\phi_{1} = 1\). Recall that for an \(AR(1)\) process to be stationary, we require \(|\phi_{1}| < 1\). Since \(\phi_{1} = 1\) (often called a Unit Root), the random walk is fundamentally non-stationary.
4. Seasonal Models and Decomposition¶
In the classical decomposition model, a series is expressed as:
$\(Y_{t} = m_{t} + s_{t} + S_{t}\)$
* \(m_{t}:\) Trend component.
* \(s_{t}:\) Seasonal component with period \(d\).
* \(S_{t}:\) Stationary process (noise).
Transformation Rules
- Lag \(d\) difference (\(\nabla_d\)): Removes seasonality of period \(d\).
- Lag 1 difference (\(\nabla\)): Applied multiple times, it removes the trend aspect of the series.
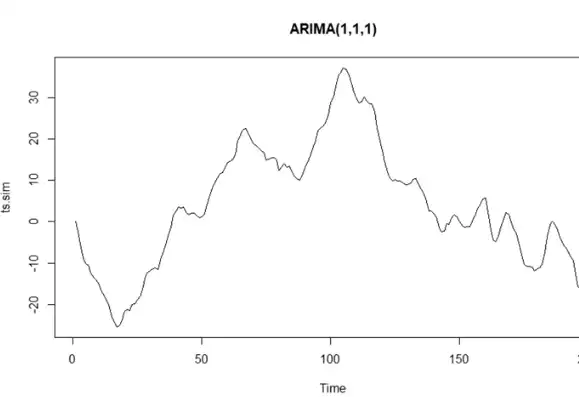
5. The \(ARIMA(p,d,q)\) Process¶
The AutoRegressive Integrated Moving Average (ARIMA) model is used when a series becomes stationary after being differenced \(d\) times.
Definition:
If \(W_{t} = \nabla^d Y_{t} = (1-B)^d Y_{t}\) is a stationary \(ARMA(p,q)\) process, then the original series \(Y_t\) is an \(ARIMA(p,d,q)\) process.
- p: Order of the Autoregressive part.
- d: Degree of differencing involved.
- q: Order of the Moving Average part.
Example: An \(ARIMA(1,1,1)\) with \(\phi_{1} = 0.7\) and \(\theta_{1} = 0.2\) implies the first difference of the data follows an \(ARMA(1,1)\) structure.